
HARK FORUM › Recording audio stream from ROS – data type error
Tagged: AudioStreamFromRos
- This topic has 9 replies, 6 voices, and was last updated 6 years, 10 months ago by
 tank1199.
tank1199.
-
AuthorPosts
-
August 12, 2019 at 4:50 pm #1105
Hello,
I am new to Hark and I am trying to record the audio captured with a HSR robot’s built-in head microphone. The following are the parameters of the stream generated by the robot:
PARAMETERS * /audio/audio_capture/bitrate: 128 * /audio/audio_capture/channels: 1 * /audio/audio_capture/device: * /audio/audio_capture/format: mp3 * /audio/audio_capture/sample_rate: 16000 * /rosdistro: kinetic * /rosversion: 1.12.14 NODES /audio/ audio_capture (audio_capture/audio_capture)I am trying to record the streamed audio with the AudioStreamFromRos node (Attached you find a screenshot of my Hark network). However, when I execute the network I get the following error message:
[ERROR] [1565594592.746777286]: Client [/MY_HARK_MASTER_NODE] wants topic /audio/audio to have datatype/md5sum [hark_msgs/HarkWave/24c5654436a3ff03c563377fdbcc56a1], but our version has [audio_common_msgs/AudioData/f43a8e1b362b75baa741461b46adc7e0]. Dropping connection.How can I configure the node to make the data type compatible?
Attachments:
August 13, 2019 at 11:31 am #1107Hi Jm,
Can you please attach the actual network file that you used.
Cheers,
EarlAugust 13, 2019 at 9:14 pm #1109Hi,
here is the network.
August 13, 2019 at 9:24 pm #1110Here. There was an upload error in the previous attempt.
Attachments:
August 16, 2019 at 6:05 pm #1122You need to use
hark_msgs/HarkWavein your workspace.
In your case,audio_common_msgs/AudioDataseems to storemp3data intouint8[]array, so you will first need to expand it to raw PCM data.Second, the data structure of
hark_msgs/HarkWaveis as follows.user@ubuntu:~$ rosmsg show hark_msgs/HarkWave std_msgs/Header header uint32 seq time stamp string frame_id int32 count int32 nch int32 length int32 data_bytes hark_msgs/HarkWaveVal[] src float32[] wavedatawavedatais a raw PCM data array. Since HARK is not aware of the number of bits, it simply casts an integer value to a floating point type. In other words,123is123.0f.data_bytesis the data size. In other words, it is the size offloat(4 bytes) multiplied by the size ofwavedata.lengthis the number of samples per frame handled by HARK. The initial value of HARK is512. Since HARK processed frame by frame, in other words, the size ofwavedatamust benchtimeslength=512.nchis the number of channels. Your device seems to be 1ch, so it should be1. For microphone array data, a larger number will be stored.countis the frame count. Since HARK processing frame by frame, it is necessary to know what frame the data is. In other words, it is incremented as the frame advances. The first frame number is0. Not1.There is a final note. In order to prevent problems in FFT/IFFT processing, etc., the frames processing by HARK are subject to sample overlap processing.
The following image may help you understand.
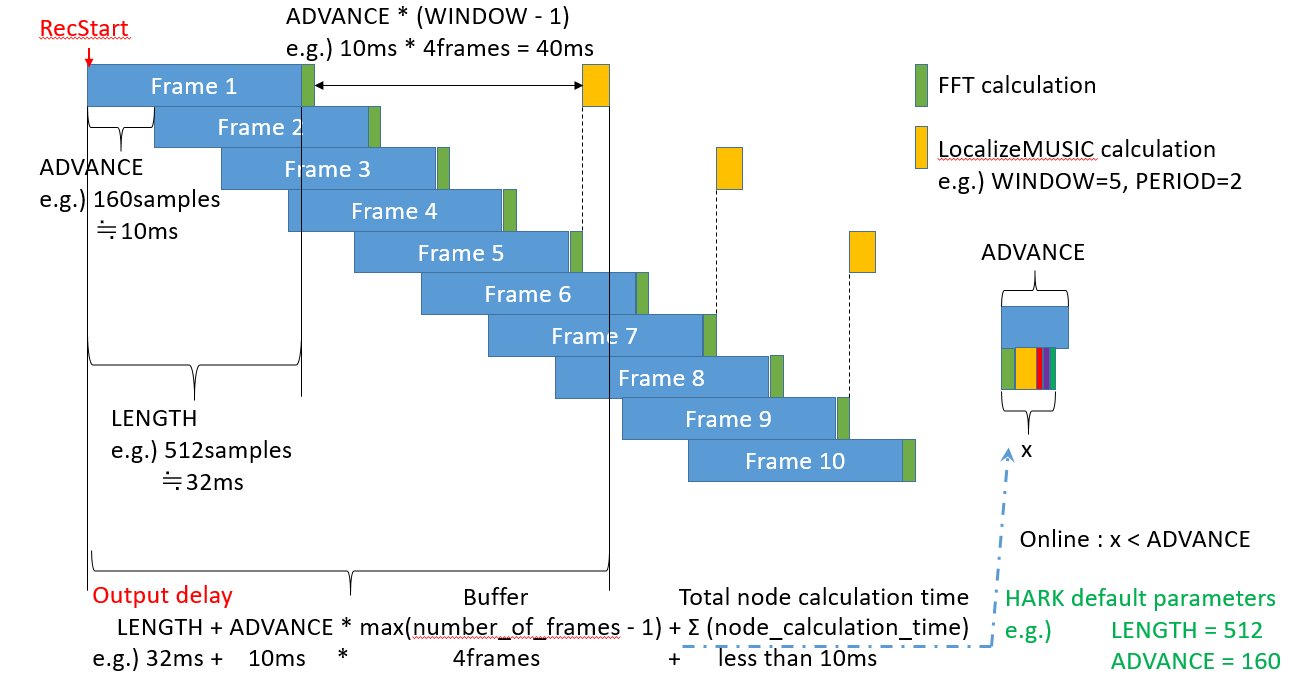
Best regards,
m.takigahiraAugust 23, 2019 at 12:28 am #1123I am using the package
ros-kinetic-audio-captureto stream the audio from the built-in microphone of the robot.With this package it is possible to stream audio data in wave format:
PARAMETERS * /audio_capture/channels: 1 * /audio_capture/depth: 16 * /audio_capture/device: plughw:1,0 * /audio_capture/format: wave * /audio_capture/sample_rate: 16000 * /rosdistro: kinetic * /rosversion: 1.12.14 NODES / audio_capture (audio_capture/audio_capture)The data structure of the data stream
audio_common_msgs/AudioDatais as follows:user@laptop:~$ rosmsg show audio_common_msgs/AudioData uint8[] dataTherefore, it is not compatible with the data structure of
hark_msgs/HarkWave.Is there a practical way to make the data structure of
audio_common_msgs/AudioDatacompatible with Hark?Otherwise, would you suggest another package different than
ros-kinetic-audio-capturein order to have Hark-compatible access to the data from the robot’s built-in microphone?Thanks in advance.
August 26, 2019 at 6:47 pm #1136Please see previous answer on how to convert Structure.
For frame proccessing, refer to the
AudioStreamFromWavesource code.
The source code can be obtained with the following command on Ubuntu.
apt source hark-coreBest regards,
HARK SupportAugust 28, 2019 at 12:55 am #1143Hello,
I’m also working on this currently.
I letaudio_capturepublish wave format. I tried to write a converter
fromAudioData (uint8[] wave)toHarkWavefollowing the instructions mentioned in this answer.
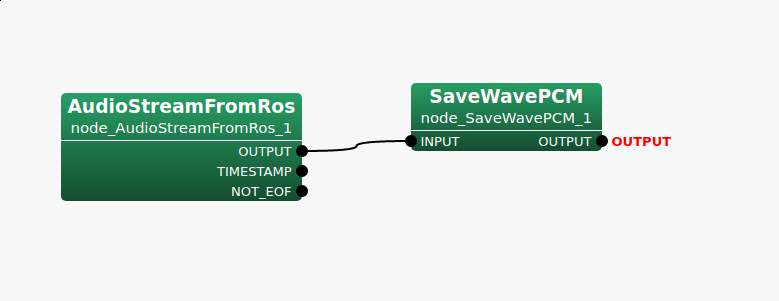
Here is what I ended up with:dhw = HarkWave() dhw.header.stamp = rospy.Time.now() dhw.header.frame_id = str(self.count) dhw.count = self.count harkwaveval = HarkWaveVal(wavedata=data_uint8) result = [] result.append(harkwaveval) dhw.src = result dhw.nch = 1 # one channel dhw.length = 320 dhw.data_bytes = 320 * 4 # float(4bytes) times length of dataWhen I run my network (attached below) it’s only receiving one message from ros and afterwards the network stops with the message “Normally finished”.
So my question is: Why does it stop, since there is no error regarding the network and the topic is still actively pushing messages?Thanks in advance.
August 30, 2019 at 12:10 pm #1152Hi Thomas.
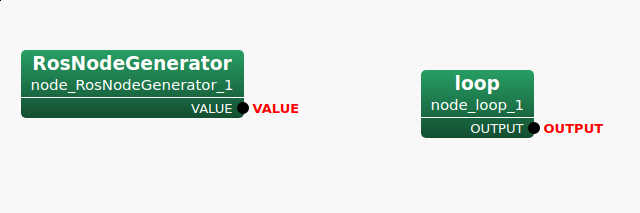
Is the sheet with
AUdioSreamFromRosandSaveWavePCMset to iterator?
If it is a subnet, it will only be executed once.Best regards,
HARK support team.-
This reply was modified 6 years, 10 months ago by
nterakado.
September 2, 2019 at 10:10 am #1157Hi Thomas,
> When I run my network (attached below) it’s only receiving one message from ros and afterwards the network stops with the message “Normally finished”.
When creating a new sheet using HarkDesigner, by default it is set to subnet which runs the network once. Please change it to iterator so that the network runs in a loop.
If it is not too much trouble, would you mind uploading a sample of the audio you are trying to stream as well as the network file?
I noticed that you did not have a condition, are you getting any errors when running the network?
-
AuthorPosts

- You must be logged in to reply to this topic.