Hello,
I’m also working on this currently.
I let audio_capture publish wave format. I tried to write a converter
from AudioData (uint8[] wave) to HarkWave following the instructions mentioned in this answer.
Here is what I ended up with:
dhw = HarkWave()
dhw.header.stamp = rospy.Time.now()
dhw.header.frame_id = str(self.count)
dhw.count = self.count
harkwaveval = HarkWaveVal(wavedata=data_uint8)
result = []
result.append(harkwaveval)
dhw.src = result
dhw.nch = 1 # one channel
dhw.length = 320
dhw.data_bytes = 320 * 4 # float(4bytes) times length of data
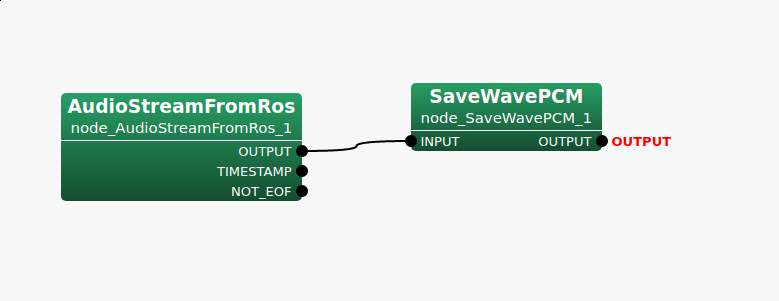
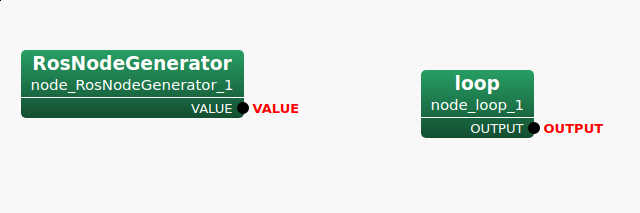
When I run my network (attached below) it’s only receiving one message from ros and afterwards the network stops with the message “Normally finished”.
So my question is: Why does it stop, since there is no error regarding the network and the topic is still actively pushing messages?
Thanks in advance.