Forum Replies Created
-
AuthorPosts
-
Hello!
Please write if I violated the rules of the forum and will not receive a response.
If I asked an incorrect question, then I rephrase it in accordance with the requirements of the forum. Thank you!2) A question concerning several parameters.
– The LENGTH and WINDOW_LENGTH parameters are in many modules. Do they have to be the same everywhere?
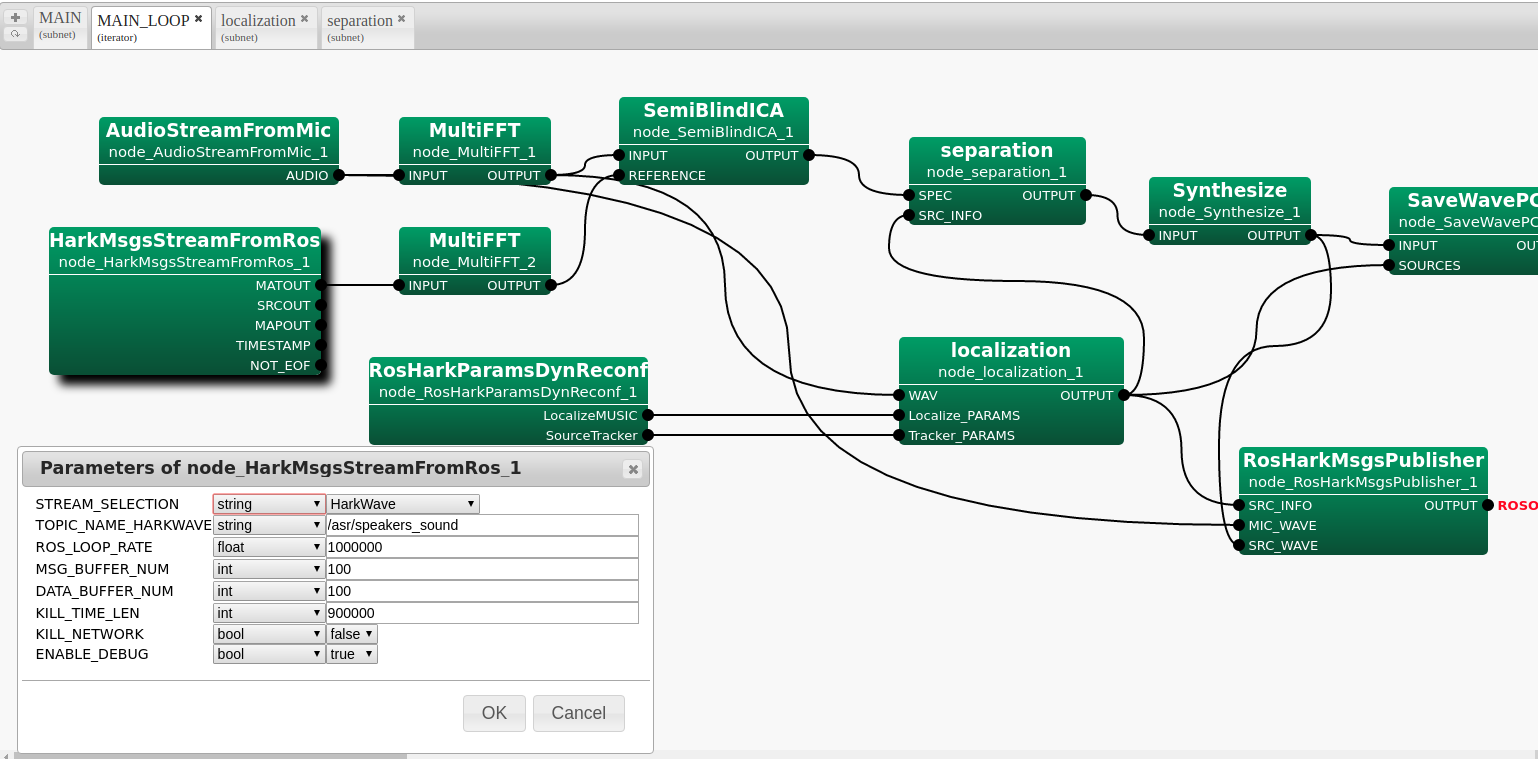
– In my case MSG_BUFFER_NUM and DATA_BUFFER_NUM in StreamFromHarkMsgs are equal in size of the buffer sent in the HarkWave message, is this correct? Or do I need to specify the queue size which is set when writing messages to the topic?
3) The HarkWave message contains count. It is equal to seq from header. Am I doing the right thing?
4) HarkWaveVal from HarkWave implies vector <float>. When saving data directly to a file, we get clear sound. After writing a message to HarkWave topic, we catch it by StreamFromHarkMsgs node and write to the file. In this case strong noises appear in the file. Do I need some kind of additional changes in order to transmit through the topic, or do I need to write to the topic just a set of bytes?
5) When recording in ROS-topic, we set the size of the stored queue. Do I need to Indicate it in some of the nodes in hark_designer?
Attachments:
Thank you so much!
If other questions arise, may I ask them here?-
This reply was modified 6 years, 9 months ago by
Steph.
I think I set some parameters incorrectly. But I can’t figure out which ones when the system is very slow.
-
This reply was modified 6 years, 9 months ago by
Thanks for the fast reply!
I tried this connection scheme. In this case, the system is very slow. I can say that it hangs. Even if we set the parameter ROS_LOOP_RATE much less than the default value.
-
This reply was modified 6 years, 9 months ago by
-
This reply was modified 6 years, 9 months ago by
Attachments:
-
AuthorPosts